2015年11月02日
全国初 給水ロボットサービスを実施
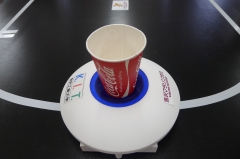
相互連携協定を締結している金沢工業大学からの提案により、お盆型給水ロボットによるランナーへの給水サービスを実施します。給水ロボットが、給水所テーブル上の走行レーンを移動し、併走するランナーに給水カップを提供します。大会当日は、この「ロボットによるおもてなし」を、ランナーはもちろん観客の皆様も楽しんでいただきたいと思っています。
【給水ロボット】
お盆型「金沢おもてなしロボット:OMOTEN」 5台
【製作】
金沢工業大学 情報フロンティア学部経営情報学科 松林 賢司 教授
同学部4年 眞下 康弘 さん(2013年 大学ロボコン世界大会優勝)
同学部 金沢マラソンプロジェクトメンバー
【機能・特徴】
1.給水カップ探知センサー
給水カップを載せると、走行開始
2.走行センサー
底面のセンサーが白線を認識し、走行レーンを移動
走行レーンを外れた場合も、センサーが感知し走行レーンに戻る
3.停止センサー
停止線を認識し停止(給水カップが載っていない場合)
4.衝突回避センサー
ロボット同士の接触を防止し、一定距離を保持しながら走行
【実施場所】
第12給水所付近(31.5km地点の城北市民運動公園)
※ランナー通過予想時間 10:40〜14:20


【給水ロボット】
お盆型「金沢おもてなしロボット:OMOTEN」 5台
【製作】
金沢工業大学 情報フロンティア学部経営情報学科 松林 賢司 教授
同学部4年 眞下 康弘 さん(2013年 大学ロボコン世界大会優勝)
同学部 金沢マラソンプロジェクトメンバー
【機能・特徴】
1.給水カップ探知センサー
給水カップを載せると、走行開始
2.走行センサー
底面のセンサーが白線を認識し、走行レーンを移動
走行レーンを外れた場合も、センサーが感知し走行レーンに戻る
3.停止センサー
停止線を認識し停止(給水カップが載っていない場合)
4.衝突回避センサー
ロボット同士の接触を防止し、一定距離を保持しながら走行
【実施場所】
第12給水所付近(31.5km地点の城北市民運動公園)
※ランナー通過予想時間 10:40〜14:20
投稿者:金沢マラソン組織委員会at 19:14| その他